

Part 2: Everything You Need To Know About Achieving Centimeter Accuracy with Trimble SiteVision

Introduction to Blog Series:
There are many bold claims relating to the accuracy of augmented reality systems. In this two part blog series, Melissa, our SiteVision Product Manager and Licensed Cadastral Surveyor from New Zealand, writes about why understanding accuracy is important, and achieving centimeter accuracy with Trimble SiteVision.
Part 2: How to achieve cm accuracy with Trimble SiteVision
Now that you have some form of understanding around what accuracy is. You need to form the other parts of the whole – The components of SiteVision, and how they work to and contribute to accuracy when visualizing data, taking measurements, and finally “Good SiteVision Practice.”
Components of Trimble SiteVision System
- The data you are visualizing
- Augmented Reality (Google Play Services for AR)
- Global Navigation Satellite System (GNSS) Technology
- Electronic Distance Measurement (EDM)
Data
Data. Data. Data. We wrote about, and highlighted the importance of data preparation in our “How SiteVision Works” blog, and it is worth highlighting again. You must have accurate data from reliable sources to have accurate visualization in the field with Trimble SiteVision.
Augmented Reality
The AR technology used by Trimble SiteVision is known as Google Play Services for AR, formerly known as Google ARCore.
The technology and service uses three core capabilities to integrate virtual content with the real world as seen through your mobile phone’s cameras:
- Motion tracking to determine the relative position and orientation of the camera.
- Environmental understanding for size and location of horizontal, vertical and angled surfaces, and
- Light estimation for the environment’s current lighting conditions.
The AR technology uses motion tracking to determine the change in the position and orientation of the phone. When the phone’s AR service is first started, it has no idea where in the world it is, or where North is. The low accuracy of phone GNSS and compass makes it difficult to ensure that things line up accurately in the real world. Additionally, unlike GNSS which gives you independent absolute positions measured each time against a frame of reference (the satellites), any errors in the motion tracking accumulate over time which shows up as a drift in the AR model relative to the real world.
GNSS
GNSS is the Global Navigation Satellite System and is most commonly known as GPS, but it also uses the satellites from other systems such as European, Russian, Japanese, or Chinese systems.
If you own a smartphone, the likelihood is high that you are holding your own GNSS receiver and have used it to navigate from A to B and find your nearest coffee shop! That little blue dot you see on your Google or Apple maps, is your location, and it’s accurate in terms of what you are using it for. When it comes to using smartphones for more than finding the coffee shop, you need something more!

It’s important when using any system with GNSS to have a basic understanding of the principles behind GNSS technology and the errors that may affect your accuracy and results.
GNSS is a system, comprised of a number of satellites, that provide location information anywhere on or near the Earth’s surface. Each satellite continually transmits messages that include the time the message was transmitted, and the satellite position. On the ground the GNSS receiver receives these messages, and completes calculations to determine how far away it is from each satellite. The receiver requires a minimum of four satellites to solve the four parameters of X,Y, Z and time.
Click here to walk through a Trimble GNSS Tutorial on “How GPS Works
Sounds like GNSS is super accurate right? Well, the real trouble for GNSS and accuracy is when it gets to the ground where there are lots of things that could make GNSS less than mathematically perfect.
GNSS requires sky visibility between the receiver and the satellite. When something lies within the direct path, or there is reduced sky visibility, the accuracy suffers due to reflections and weakening of signals. The signal may bounce off various local obstructions before it gets to a receiver. This is called multipath error, and the result is a mess of delayed and reflected signals arriving at the receiver which can degrade the accuracy of the measurements. This is particularly problematic in urban environments, valleys and in mountainous areas.
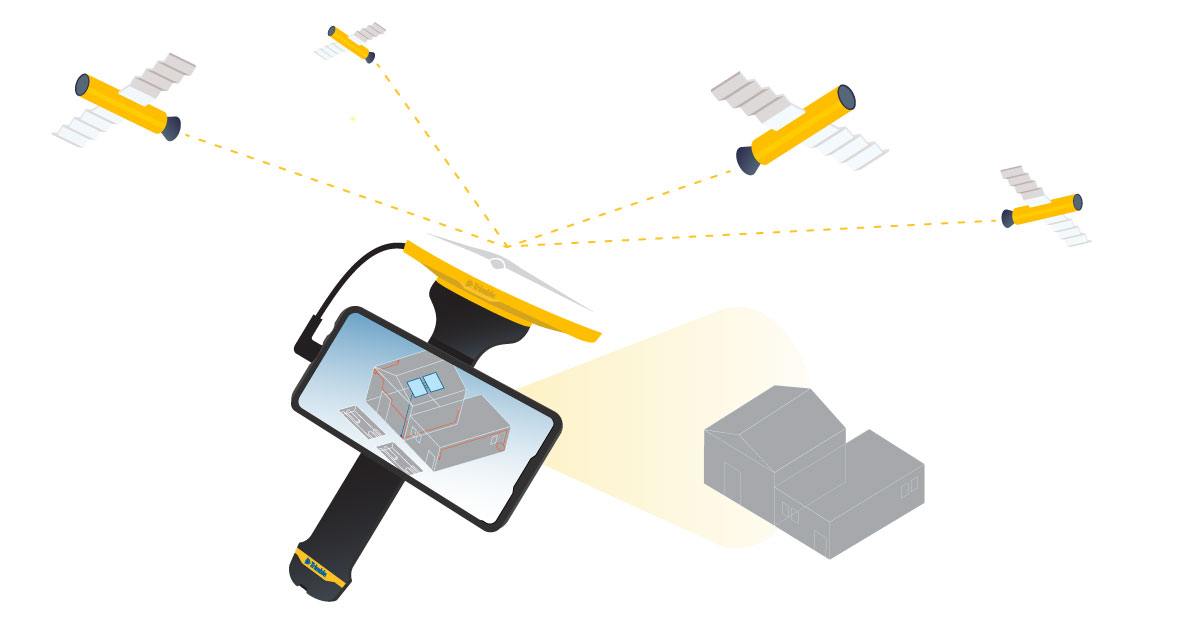
This diagram illustrates the basics of GNSS with SiteVision
Electronic Distance Measurement (EDM)
The Trimble SiteVision Integrated Positioning System contains a laser rangefinder, also known as an Electronic Distance Measurement (EDM) tool. The EDM in Trimble SiteVision emits a red laser beam to a target, and measures a distance through phase measurement techniques.
The EDM allows us to measure points from any surface that is able to reflect it. In combination with the AR reference frame and the GNSS reference frame, the laser within the Integrated Positioning System can measure the slope distance, as well as two angles (horizontal and vertical) which makes it possible to calculate the point coordinates. Using the measurement applications in Trimble SiteVision you can calculate the point coordinates, distance between two points, as well as the cut/fill value between the real and design surface.
The EDM does not necessarily improve the accuracy of visualization with SiteVision but it is an important part of the whole when understanding accuracy and how to achieve centimeter accuracy with SiteVision.
How to achieve centimeter accuracy with SiteVision?
When you combine your data with the technologies that create Trimble SiteVision, you get a number of parts each with their own accuracy, creating a whole which as a result has an overall accuracy.
So, how do you achieve centimeter accuracy with Trimble SiteVision? You do this by following good survey practice. That is, understanding the components of the technology, the potential errors, and use your knowledge to make informed decisions about the data that you are seeing in the field.
Positioning Accuracy
Standardized Hardware
The Trimble SiteVision Integrated Positioning System combines the Trimble Catalyst DA1 Antenna, an EDM and power management on a standardized or fixed hardware system.

The Integrated Positioning System, as a fixed all in one handheld device, provides a point of accuracy because the antenna is always in the same fixed position relative to the phone camera. After a one time set up using a Trimble recommended device, or using the recommended calibration/measurement routine, you can position your phone in the same position each time, reducing the potential errors resulting from using a floating antenna and the camera moving in relation to the antenna.
Positional Accuracy
Trimble SiteVision application is built upon the Google Play Services for AR which is available on supported Android mobile devices. This service uses the mobile devices camera for visual odometry, in conjunction with other sensors, including tilt, in the mobile device to track movement over time within the AR reference frame. A limitation of this technology is that small errors accumulate with time, and results in the model drifting
To provide absolute positioning and solve the limitations of model drift, we use GNSS technology. SiteVision uses the coordinate information from the data, and combines this with the GNSS coordinates being received via the Trimble Catalyst Service, to position your data models with accuracy in AR. To obtain the orientation of the data model, SiteVision relies on a GNSS vector created from multiple points while moving to obtain a reliable heading/orientation. This is why when you first start SiteVision you are prompted to wait for a position, and then walk 10 meters or 10 yards. Whilst waiting, and walking your model is being positioned, and rotated to be presented accurately in the real world.
When you are stationary for a period of time the system becomes increasingly dependent on the accuracy of the visual odometry of the phone, and as a result the model may drift over time.
If the Google AR system detects a tracking error in its visual odometry the SiteVision application will advise you. The SiteVision constantly corrects for orientation and model drift by tying the AR reference frame to the GNSS reference frame at your location, and using the GNSS vector to continually correct the orientation in the horizontal axis. The vertical axis is determined and controlled by the AR technology that uses the device’s tilt sensor.

Taking Measurements with Trimble SiteVision
Measuring with the EDM:
The EDM within the Integrated Positioning System can measure distances of up to 30m with an accuracy of +/-3mm. However, when measuring with the EDM, you need to take into account how you are measuring the object (handheld or on a pole), and you should also consider the location and type of object being measured as not all situations and surfaces are good for remote measurements.
When measuring with the EDM, we recommend keeping your distances short. The longer the distance, at flat angles, the greater the horizontal movement,and resulting horizontal error, from any small movement of your hand.
Measuring with GNSS:
The GNSS used with Trimble SiteVision is the Trimble Catalyst Technology. The system utilizes a range of correction sources, including SBAS, Trimble RTX and Trimble VRS networks, as well as local correction sources. When measuring positions, lines or cut/fill values with Trimble SiteVision in ideal GNSS environments you can achieve centimeter accurate positions.We recommend using a range pole to obtain the best results. Click the following links to learn more about Trimble Catalyst Technology, and the Trimble RTX and VRS networks.
Note: Trimble SiteVision subscriptions include worldwide and configuration-free access to Trimble correction services through the Trimble Corrections Hub (TCH). TCH dynamically selects the appropriate correction service based on the environment and availability. Click the following links to learn more about Trimble Catalyst Technology, and the Trimble RTX and VRS networks.
 Source: Trimble Positioning Services
Source: Trimble Positioning Services
Measuring with AR:
AR measurements taken with Trimble SiteVision use the Google Services for AR. The accuracy of the coordinates of the points is a function of the accuracy of the location of the model, the quality of the GNSS positioning and orientation, at the time of measurement and the accuracy with which the point is selected. If measurements are taken before obtaining high accuracy GNSS, they will move once accurate position and orientation is obtained because they are recorded in the AR coordinate space and move with AR model is it is aligned.
Note: For the highest accuracy measurements, Trimble recommends using the GNSS functionality.

Good SiteVision Practice
To obtain the best results with Trimble SiteVision, you need to be aware of how the system works, and the potential errors that could be introduced. Here are some tips:
- Understand the technology, the limitations, and the environments for best results
- When using EDM measurement, walk towards the point to be measured, before the measurement is made. The longer the distance walked the better.
- Avoid rapid rotations of the device before making an EDM measurement. Rapid rotation can cause a heading error.
- Keep EDM measurements as short as possible. The practical range is 2 – 10 meters. Shorter range reduces the position error introduced by errors in orientation.
- For the best accuracy, make the measurements directly with the GNSS and a pole.
- Remember that not all errors can be detected automatically by the SiteVision system. As a result remote points measured with EDM are not warranted for survey or safety purposes.
Overall, to achieve high accuracy results with Trimble SiteVision you must understand all of the components, the Integrated Positioning System (GNSS and EDM) Google Play Services for AR and how they all interact.
Read Part 1: Why Understanding Accuracy Is Important here >

Want to learn more about SiteVision, click here >
More Trimble SiteVision
Subscribe to the Trimble SiteVision blog so you'll be alerted with the latest posts.